Hardware System Interfaces
Abstraction lets us break a large system into smaller subsystems. Subsystems interact with each other to accomplish the system level requirements. Subsystem interactions should be defined with Interface Control Documents. These agreed on design elements will simplify communication between designers, as dicsussions are only required when you need to deviate from the original plan. This also allows you to design your subsystem, without having to reference the whole system, as long as you remain within your agreed to interface area.
The physical interfaces can include bolt patterns, cable connectors and pinouts, and hydraulic fittings. These interfaces are further defined with thresholds and tolerances, such as:
- Available electrical voltage and current
- Fluid flow rates and pressure
- Allowable temperatures
- Required surface texture to ensure water sealing
NOTE
Programming has a similar concept with APIs (Application Programming Interface), where the program's developer documents how to interact with the program. This allows customers to use the program with an input⟶output mindset, without needing to review the full program source. Similarly, the full API definition includes thresholds and tolerances like allowable data rate, and the required structure of data.
This diagram is from MIT's OpenCourseWare's Fundamentals of Systems Engineering: Systems Integration and Interface Management.
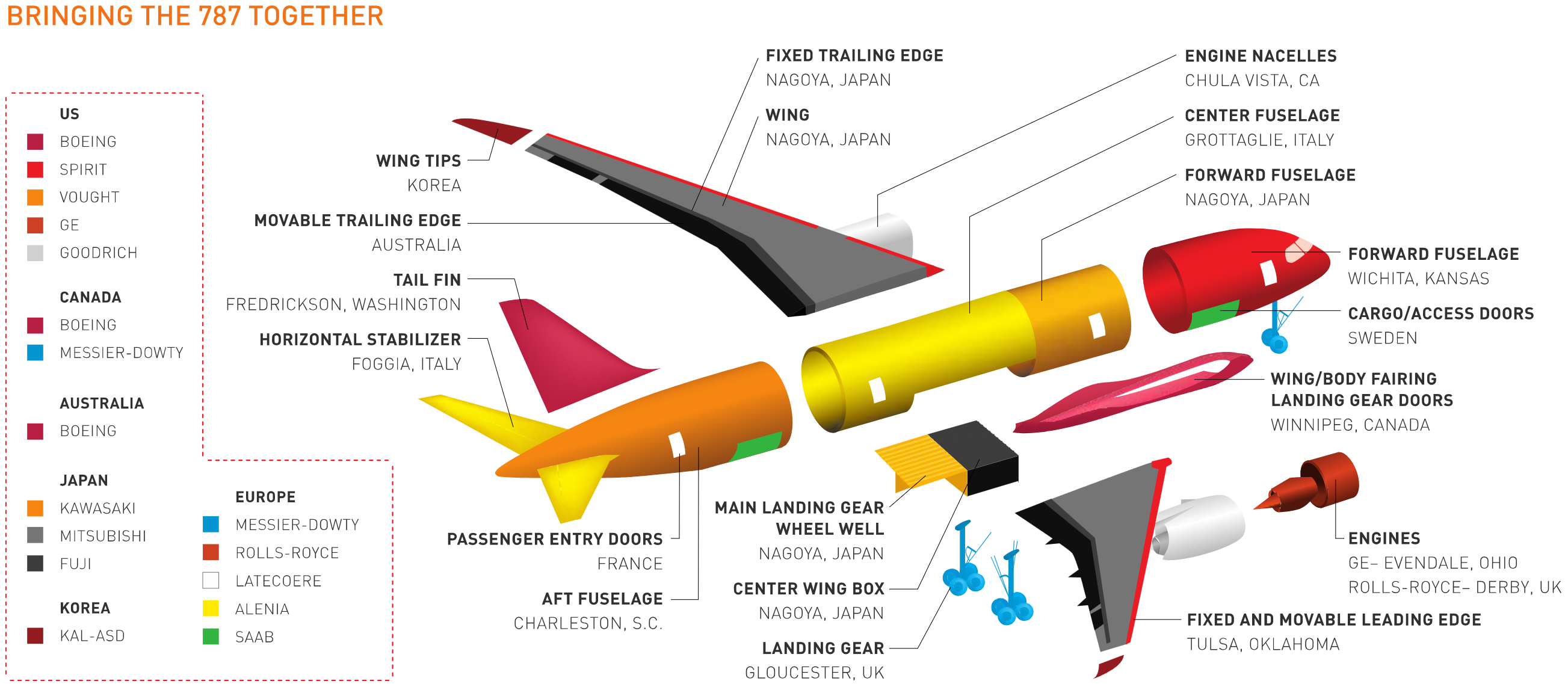
Interface definition would allow Boeing's different design teams or contractors work in isolation, and then have subsystems mate when merging design work. The Wings interface with the Fuselage, with definition for elements like:
- Fastening points
- Required stiffness of structure at the interface
- Allowable mass and centre-of-gravity
- Data communication and wiring
- Lights and HMI requirements
- Pneumatics or hydraulics
- Fuel lines
Documenting these interfaces will help the initial design teams, but it will also help future designers as they update the design, such as changing to a larger turbofan engine.
Common Interfaces For Robots
- Mechanical
- Bolt pattern for payloads and appliances on top of a robot
- End-effector or attachment bolt patterns (ISO 9409-1)
- Charging docks
- Autonomous docking targets
- Centre-of-gravity and global model origin
- Electrical
- Port and Jack numbering (ASME Y14.44)
- Allowable current and voltage
- Data bus options
- Software and Autonomy
- ROS topics, services, and actions
- Network IP addresses
- Serial baud rate, bit structure
- Differentiating devices (udev, MAC addresses, serial numbers, physical port)